Diseño de referencia del controlador de ventilador BLDC
[ad_1]
Un controlador de ventilador CC sin escobillas (BLDC) para implementar el control de velocidad térmica en ventiladores BLDC.
En los últimos años se han producido avances significativos en los dispositivos de procesamiento de datos caracterizados por un tamaño más pequeño, una mayor potencia de procesamiento y una mayor velocidad. Sin embargo, estas mejoras de rendimiento han llevado a una mayor necesidad de mejorar las capacidades de enfriamiento, particularmente en los ventiladores de enfriamiento. Estos requisitos incluyen control de velocidad variable para minimizar el ruido y ahorrar energía, gestión térmica eficiente, protección contra el desgaste mecánico y prevención de errores. NXP ha lanzado el diseño de referencia para controladores de ventiladores de corriente continua sin escobillas (BLDC), que brinda una solución para implementar el control de velocidad térmica en ventiladores BLDC. El diseño utiliza un algoritmo de control de velocidad simple que administra de manera efectiva la velocidad del ventilador en escenarios comunes, priorizando factores como la reducción de ruido, la eficiencia energética, la gestión térmica y la protección contra fallas.
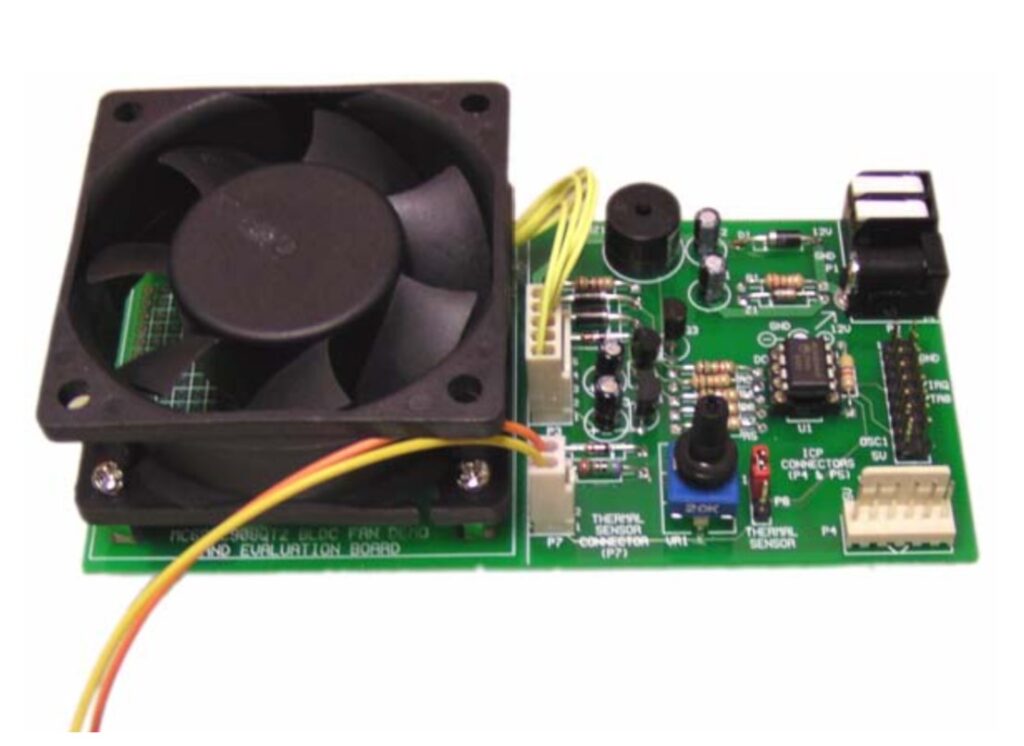
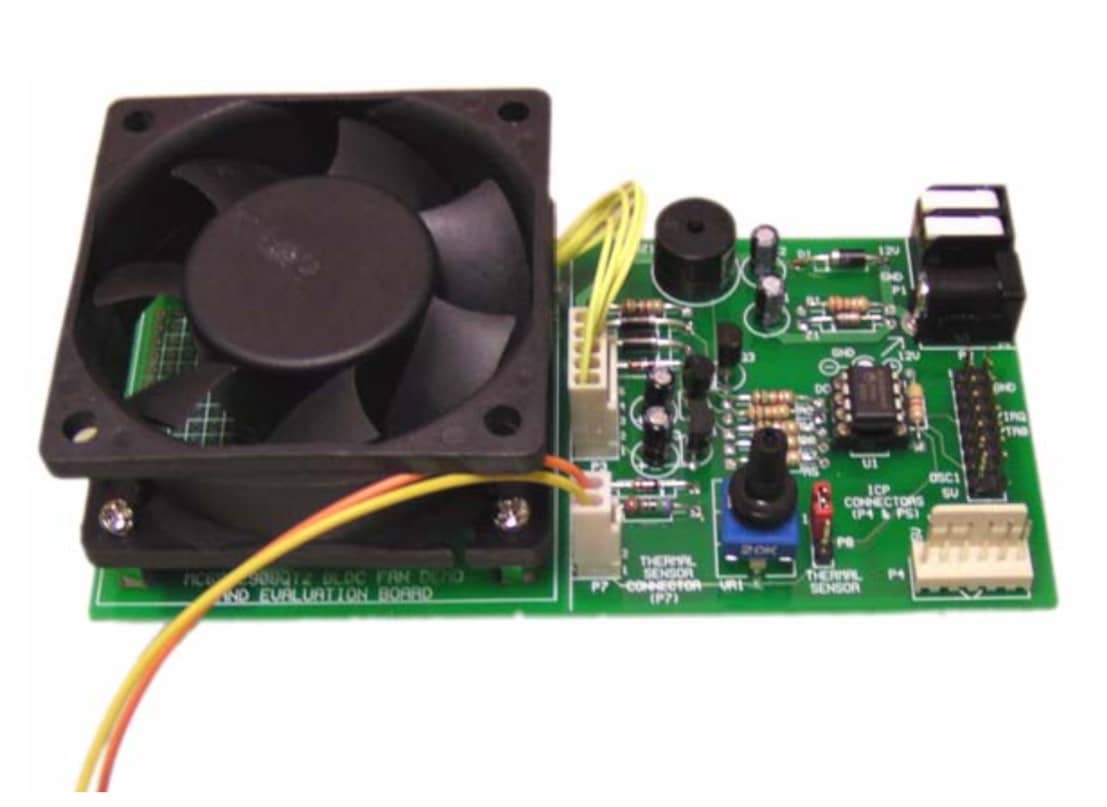
El diseño de referencia se basa en la unidad de microcontrolador (MCU) de 8 pines MC68HC908QT2, que agrega una serie de funciones de control al diseño. Estos incluyen ajuste automático de velocidad, protección contra bloqueo del motor, alarmas de sobrecalentamiento y bloqueo del motor, programación en circuito para actualizaciones de firmware y ajuste manual de velocidad. El diseño del controlador de ventilador BLDC consta de un ventilador BLDC, un sensor de efecto Hall, MCU, regulador, transistores, sensor de temperatura y zumbador. La forma básica en que funciona es que la MCU inicia el ventilador BLDC impulsando los transistores. Al mismo tiempo, el sensor de efecto Hall detecta la posición del ventilador y ajusta el nivel lógico en consecuencia. Usando señales del sensor de efecto Hall, la MCU controla el impulso del ventilador a través de un proceso llamado conmutación. La velocidad del ventilador está determinada por la entrada recibida de un sensor de temperatura externo. En función de la entrada de este sensor térmico, la MCU ajusta el tiempo de apagado en consecuencia.
El ventilador BLDC está alimentado por una entrada de alimentación regulada de 12 V, 1 A. El zumbador piezoeléctrico se utiliza en el circuito de alarma de bloqueo del motor para detectar la temperatura. El circuito de alarma utiliza un tono de 350 Hz con un ciclo de trabajo del 15 %. Para evitar problemas de sobrecorriente, el diseño cuenta con un circuito de protección de bloqueo del motor que detendrá el motor si el software detecta una condición sin señal Hall que dure más de 100 ms. Se agregan condensadores y diodos adicionales al diseño para filtrar picos de voltaje más altos. El mapeo de temperatura-velocidad es una parte integral del diseño, que tiene en cuenta las variaciones en los requisitos de enfriamiento de la aplicación, las características del sensor térmico y las características del motor. El firmware incluye un mapeo de perfil de velocidad térmica de 256 pasos, lo que permite una fácil personalización según los requisitos específicos del usuario.
Este diseño de referencia fue probado por NXP. Incluye una lista de materiales (BOM), esquemas, un diseño de placa de circuito impreso (PCB), etc. Se pueden encontrar más datos de diseño de referencia en el sitio web de la empresa. Para obtener más información sobre este diseño de referencia, haga clic aquí.
[ad_2]
Si quieres conocer otros artículos parecidos a Diseño de referencia del controlador de ventilador BLDC puedes visitar la categoría Electrónica.

Deja una respuesta