PULSAR: Un vuelo seguro para entornos impredecibles
[ad_1]
Los vehículos aéreos no tripulados (UAV) integran sistemas integrados de detección, mapeo, planificación y control utilizando microcomputadoras y sensores LiDAR.
Los vehículos aéreos no tripulados (UAV) se han vuelto cada vez más indispensables en las operaciones de búsqueda y rescate, estudios de espeleología y mapeo arquitectónico. Sin embargo, equilibrar los conceptos visionarios con la aplicabilidad práctica requiere un pensamiento innovador y soluciones de ingeniería sólidas para dar vida a los UAV.
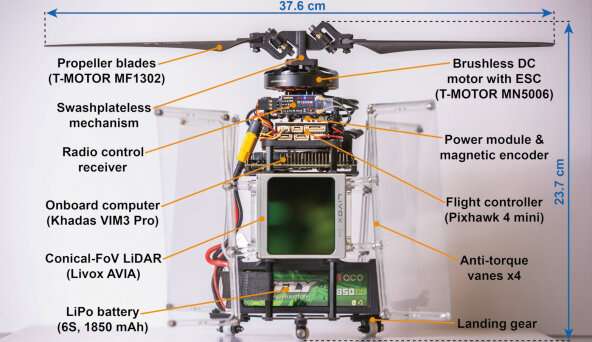
Investigadores de la Universidad de Hong Kong (HKU) han presentado PULSAR, un robot aéreo con sensor LiDAR que vuela propulsado y extremadamente poco activado. PULSAR, llamado así por el púlsar astronómico, lleva la tecnología UAV a un nuevo nivel. Cuenta con detección, mapeo, planificación y control integrados mediante microcomputadoras y sensores LiDAR para interiores y exteriores, sin instrumentos externos.
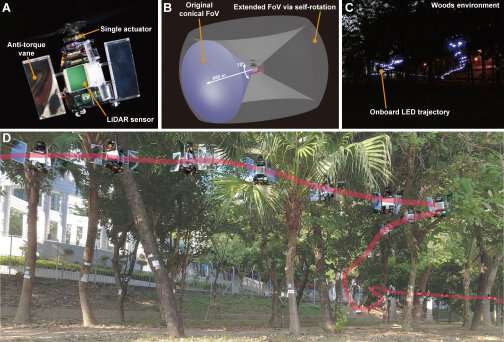
La funcionalidad de PULSAR se basa en un solo actuador, lo que permite un mecanismo, empuje y momento sin plato cíclico. El equipo demostró su detección de obstáculos en tiempo real, seguimiento de trayectoria y navegación autónoma en la oscuridad a través de experimentos. PULSAR se mantiene estable incluso en condiciones impredecibles y resiste las perturbaciones del viento externo. Mantiene el vuelo estacionario dentro de un rango pequeño a una velocidad máxima del viento de 4,5 m/s, lo que garantiza vuelos más seguros y estables incluso en entornos salvajes. Además, el sensor puede ampliar la vista girándose, lo que aumenta la percepción y la eficiencia del UAV. Actualmente se utilizan dos métodos intensivos en corriente para ampliar el campo de visión del sensor.
El primer método utiliza sensores de gran angular como ojo de pez, cámaras catadióptricas o LiDAR de 360°, que introducen distorsión. Sin embargo, el LiDAR de 360° tiene un campo de visión vertical limitado y una resolución limitada. El segundo método utiliza múltiples sensores (multicámara o multi-LiDAR), lo que aumenta los costos y el tiempo de procesamiento de datos. PULSAR reduce el consumo de energía en un 26,7 % en comparación con un UAV cuadricóptero similar, manteniendo la agilidad. Su sistema de propulsión de un solo actuador minimiza la pérdida de energía y logra una alta eficiencia de vuelo de 6,65 g/W. A pesar de sus dimensiones compactas, este UAV logró un tiempo de vuelo estacionario de más de 12 minutos. Al quitar el sensor LiDAR y actualizar la hélice y la batería, el tiempo de vuelo estacionario de PULSAR se puede extender a más de 40 minutos.
Los investigadores creen que su plataforma de investigación permitirá la investigación de vehículos aéreos no tripulados autogiratorios y apoyará el estudio de métodos de control y técnicas de localización y mapeo simultáneos (SLAM) en rotación de alta velocidad y movimiento agresivo.
Referencia: Nan Chen et al., Un UAV autogiratorio de accionamiento único con campo de visión de sensor extendido para navegación autónoma, ciencia robótica (2023). DOI: 10.1126/scirobotics.ade4538
[ad_2]
Si quieres conocer otros artículos parecidos a PULSAR: Un vuelo seguro para entornos impredecibles puedes visitar la categoría Electrónica.

Deja una respuesta